think of a data-structure as the following:
- i have data. i want to perform a certain set of operations on the data (this is called the interface). i think of it as affordances — a set of things that is possible on this data (you define it; you specify it (or create the requirement, if you may)).
- how you do the operations is the data-structure.
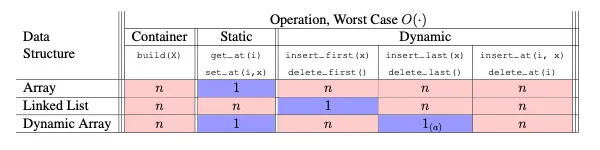
some interesting things about standard lists:
- get / set / length (operations) are constant time. because get and set uses indices, while length is a static integer. therefore, in big o notation, this is o(i) where i is constant time.
- iterating or building an array is linear time or o(n) because i need to go over every single unit to build or iterate. therefore, this will grow with size.
linked lists are interesting. if an array is a continuous sequence of memory, a linked list item is an array of size 2 where:
arr[0]is the dataarr[1]is the address or ‘pointer’.
this is useful because if you want to insert_at an index, you don’t need to shift the contents of the whole array; you can add it in an arbitrary position in memory.
even if you add to the end of an array, you are still shifting (in memory because the computer may have stored something in the next chunk of memory).
but in linked lists, get / set requires you to iterate over the array (using the pointers). you can insert at the beginning in constant time (change pointer of head to new element).
static arrays great for static operations.
dynamic arrays:
dynamic arrays don’t care about memory management. each array is:
where a[i] is length of the array and length is greater by some constant factor k . you store metadata about the array in another array:
- head
- length
- size
when length(n) = size, allocate new array of k * size where kis some constant factor.
resize time / cost is linear because you increment double of previous.