learnt about electromyographic sensors, that record electrical activity produced by skeletal muscles. kate hartman also showed her kinetic wearables toolkit.
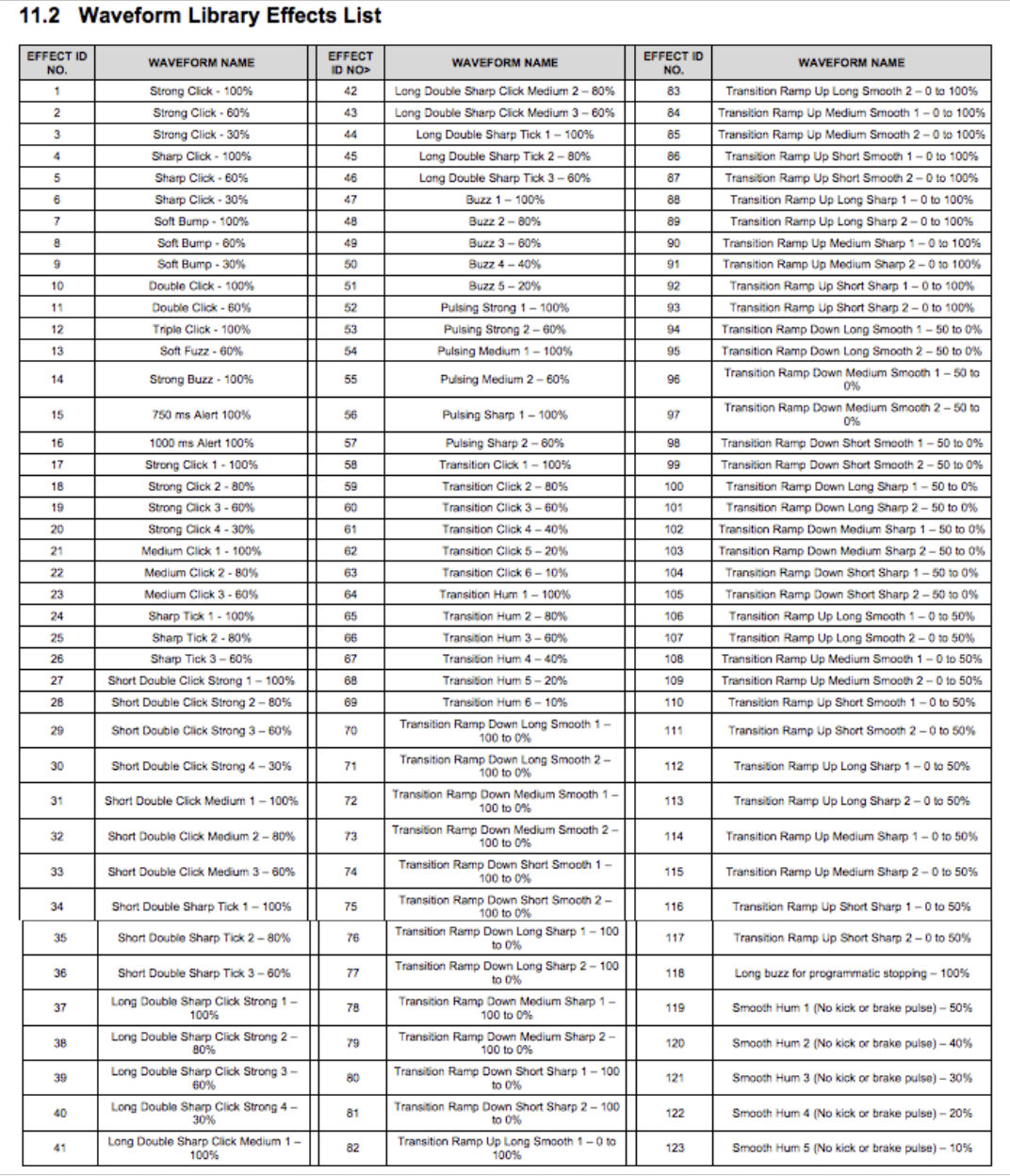
haptic motors also have specific motor drivers such as these that allow a person to send out pre-programmed effects.
this wasn’t particularly of interest to me — it’s just turning intensity into an envelope like sound does with amplitude.
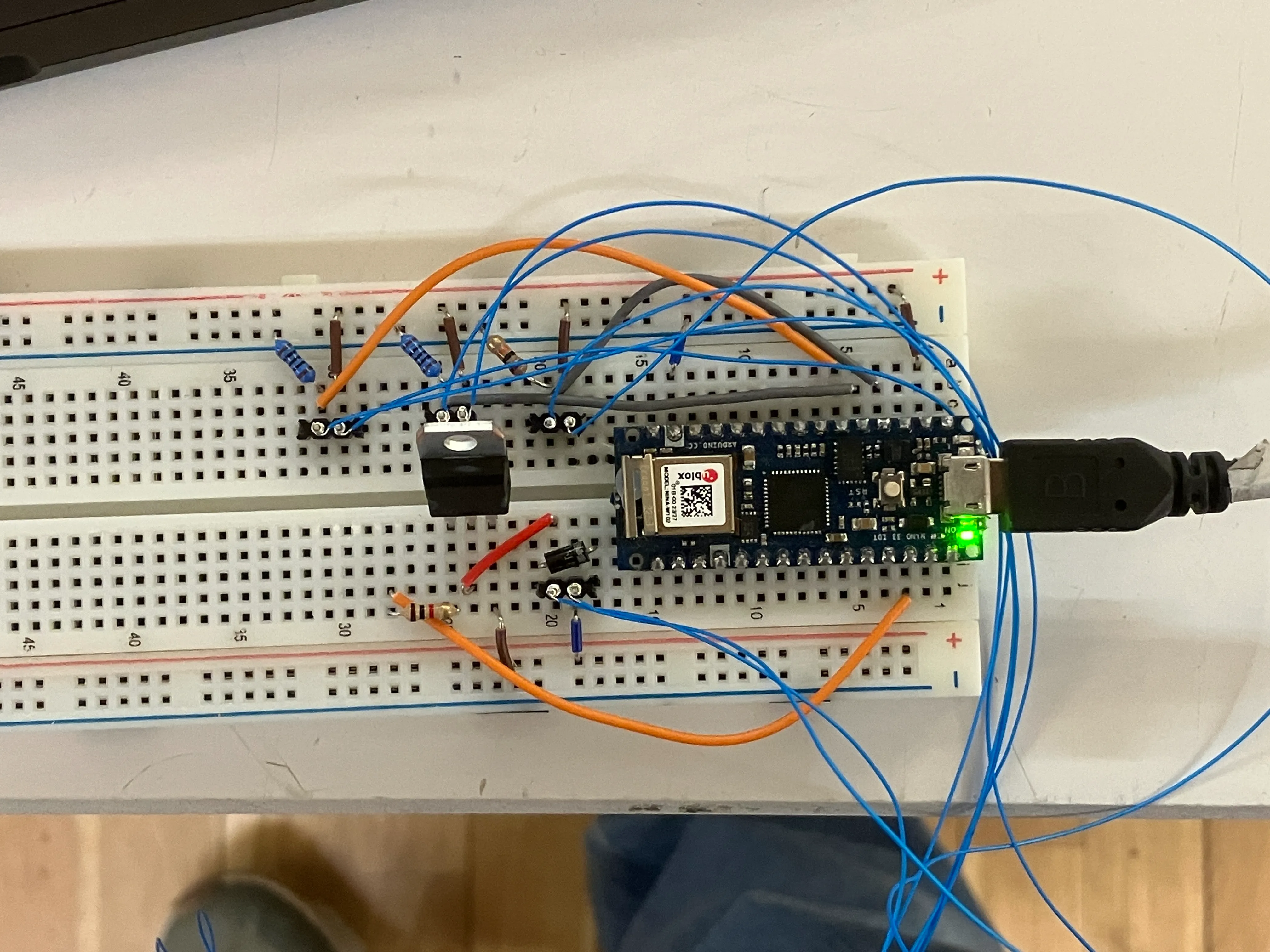
made this:
code:
//used chat-gpt to build parts of my sketch because there wasn't enough time.
int number_fsr = A0;
int operation = A1;
int result_seek = A2;
int result_motor = 10;
int number_prev = 0;
int operation_prev = 0;
int result_prev = 0;
int threshold = 70; // raised for stability (0–1023 range)
// calculator variables
int num1 = 0;
int num2 = 0;
int result = 0;
int tap_count = 0;
unsigned long last_tap_time = 0;
unsigned long tap_timeout = 600;
bool operation_selected = false;
void setup() {
Serial.begin(9600);
analogReadResolution(10); // important for Nano 33 IoT (0–1023)
analogWriteResolution(8); // standard PWM range 0–255
pinMode(result_motor, OUTPUT);
}
void loop() {
read_number_fsr();
read_operation_fsr();
read_result_seek();
// analogWrite(result_motor, 200);
// delay (1000);
}
void read_number_fsr() {
int curr = analogRead(number_fsr);
// rising edge detection
if (number_prev < threshold && curr >= threshold) {
tap_count++;
last_tap_time = millis();
Serial.print("tap detected: ");
Serial.println(tap_count);
delay(150); // small debounce
}
// finalize number after timeout
if (tap_count > 0 && millis() - last_tap_time > tap_timeout) {
if (!operation_selected) {
num1 = tap_count;
Serial.print("num1 set to: ");
Serial.println(num1);
} else {
num2 = tap_count;
Serial.print("num2 set to: ");
Serial.println(num2);
}
tap_count = 0;
}
number_prev = curr;
}
void read_operation_fsr() {
int curr = analogRead(operation);
if (operation_prev < threshold && curr >= threshold) {
if (!operation_selected && tap_count > 0) {
num1 = tap_count;
tap_count = 0;
Serial.print("num1 finalized as: ");
Serial.println(num1);
}
if (num1 == 0) {
Serial.println("cannot select operation. num1 not set.");
} else {
operation_selected = true;
Serial.println("operation selected: +");
Serial.println("enter num2...");
}
delay(200); // debounce
}
operation_prev = curr;
}
void read_result_seek() {
int curr = analogRead(result_seek);
// rising edge detection
if (result_prev < threshold && curr >= threshold) {
if (num1 == 0 || num2 == 0) {
Serial.println("cannot calculate. missing number.");
} else {
calculate_result();
vibrate_motor(result);
}
// reset state
num1 = 0;
num2 = 0;
result = 0;
operation_selected = false;
Serial.println("system reset");
Serial.println("------------------");
}
result_prev = curr;
}
void calculate_result() {
result = num1 + num2;
Serial.print("calculating: ");
Serial.print(num1);
Serial.print(" + ");
Serial.print(num2);
Serial.print(" = ");
Serial.println(result);
}
void vibrate_motor(int times) {
if (times <= 0) {
Serial.println("result zero. no vibration.");
return;
}
Serial.print("vibrating ");
Serial.print(times);
Serial.println(" times");
for (int i = 0; i < times; i++) {
analogWrite(result_motor, 253); // full power
delay(500); // longer pulse so motor spins up
analogWrite(result_motor, 0);
delay(500);
}
}learnt (still not 100% sure) that different transistors have different levels of frequency by which they can send signals to open & close the gate.
the circuit worked with a tip-102, but not a 2n3904.
that can’t be possible, because the smaller transistors work fine for audio signals, which oscillate at higher rates (i assume).