spoke about motors.
pedro’s definition of an actuator:
- three types : pneumatic (gas), hydraulic (liquid), electric; operated with:
- control signal + energy source ⇒ movement.
saw windshield wiper motors, servos, dc, etc. learnt about how each one of them works.
https://learn.sparkfun.com/tutorials/motors-and-selecting-the-right-one/all
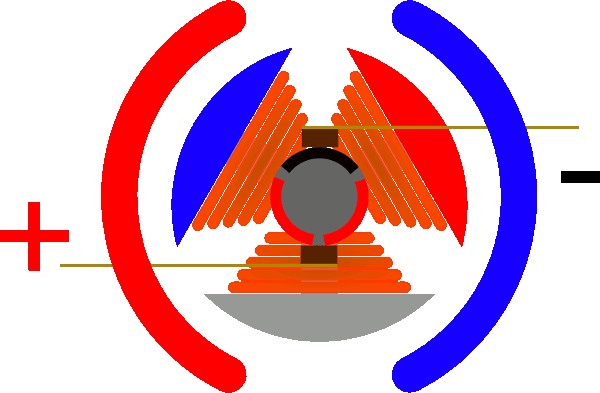
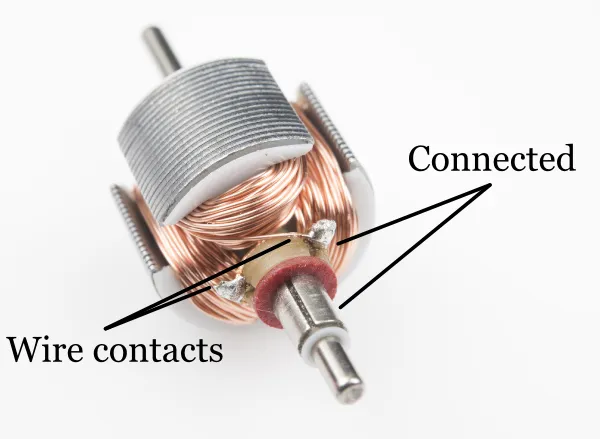
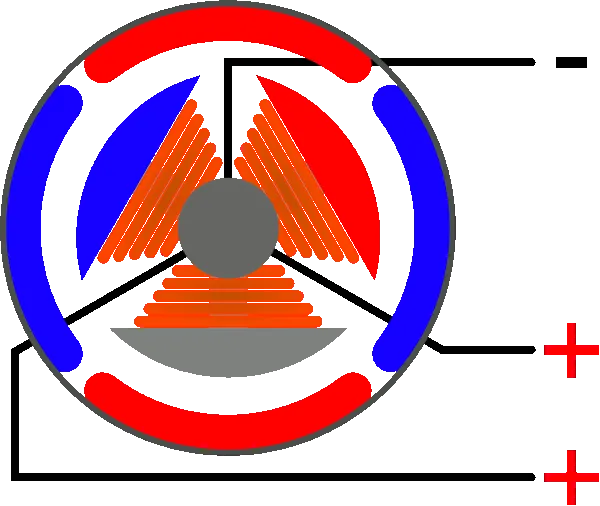
As the windings are energized, they attract to the magnets located around the motor. This rotates the motor until the brushes make contact with a new set of commutator contacts. This new contact energizes a new set of windings and starts the process again. To reverse the direction of the motor, simply reverse the polarity on the motor contacts. Sparks inside a brush motor are produced by the brush jumping to the next contact. Each wire of a coil is connected to the two closest commutator contacts.
brushless motors have more power. they operate a bit differently.
the way to control a motor is:
control → driver → motor.
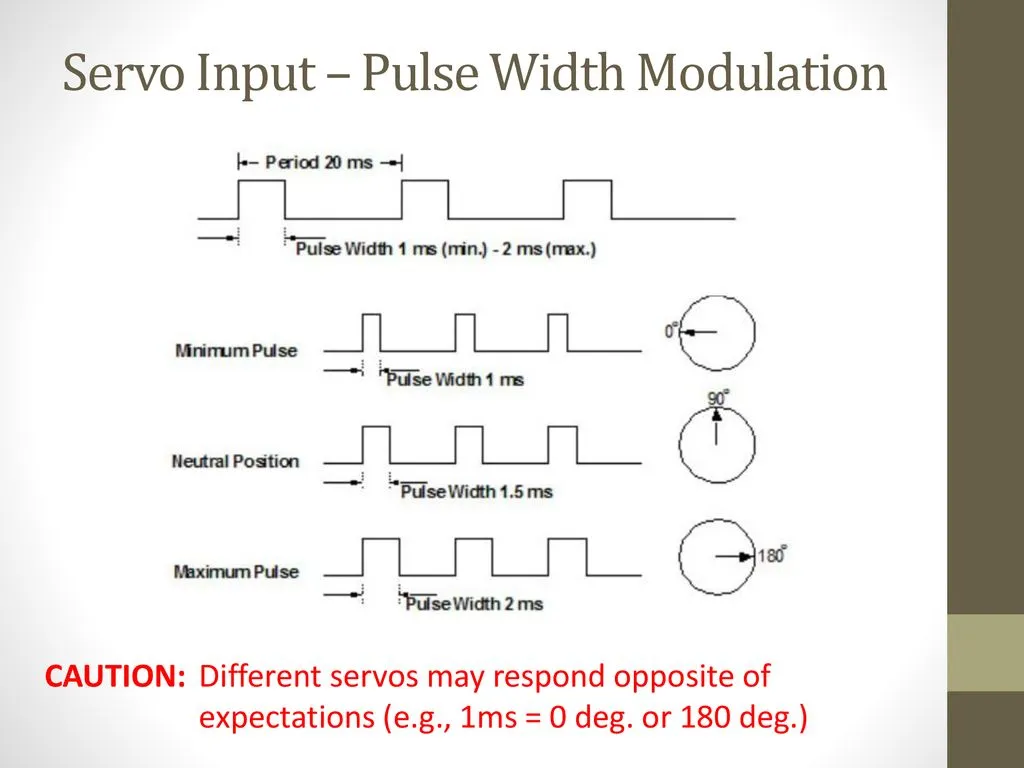
spoke about generating pulse-width-modulation to tell a servo angle to rotate to. servos expect a pulse every 20ms or so. just by changing the duty cycle, you can tell a servo what angle to rotate to.
this is an example of a closed-loop circuit where the motor speaks back to the control. the control keeps asking: did you get there ⇒ if not, keep moving.
this can be done by adding a position potentiometer to tell the microcontroller its current position. most servos have this, and a chip (a mictrocontroller).
then spoke about steppers. steppers need current to stay in position. they are usually power hungry, and move in steps.
to check the coils, one can do continuity. the wires that have continuity belong to the same coil.